




suivant: Ordres moteurs
monter: Application à la robotique
précédent: Application à la robotique
Table des matières
Index
Principe du traitement visuel
Le traitement visuel correspond à des modules de vision pré-attentive programmés dans Prométhée. Toute la richesse de ce traitement n'a pas été exploitée dans le cadre de la tâche que l'on s'est fixée.
Le robot prend une image de son environnement avec sa petite caméra, qui correspond à un champ visuel d'environ 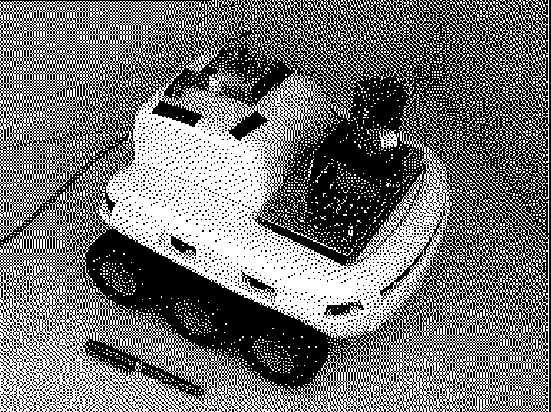 .
Il connaît sa direction grâce à la boussole.
.
Il connaît sa direction grâce à la boussole.
- Sur la ligne qui correspond à l'horizon du robot (les points qui sont à la même hauteur), le traitement visuel pré-attentif sélectionne
 zones correspondant aux contrastes les plus forts.
Pour chacune de ces zones, une imagette
zones correspondant aux contrastes les plus forts.
Pour chacune de ces zones, une imagette
 pixels est prise, avec le point de fort contraste pour centre.
Cette imagette, stockée en mémoire, constitue un ``amer'' (un ``objet'' qui sert de point de repère).
À chaque amer est attribué un angle absolu (azimuth) grâce à la boussole (l'azimuth varie de 0 à
pixels est prise, avec le point de fort contraste pour centre.
Cette imagette, stockée en mémoire, constitue un ``amer'' (un ``objet'' qui sert de point de repère).
À chaque amer est attribué un angle absolu (azimuth) grâce à la boussole (l'azimuth varie de 0 à  , par pas de
, par pas de  , ce qui fait 90 valeurs possibles).
Pour chaque amer sélectionné, un degré de confiance est attribué à chaque valeur angulaire, compris entre 0 et 1 (la valeur la plus élevée correspondant à la direction estimée de l'amer en question).
Ce degré de confiance est lié à la précision de la boussole.
, ce qui fait 90 valeurs possibles).
Pour chaque amer sélectionné, un degré de confiance est attribué à chaque valeur angulaire, compris entre 0 et 1 (la valeur la plus élevée correspondant à la direction estimée de l'amer en question).
Ce degré de confiance est lié à la précision de la boussole.
- Lorsque, à un moment ultérieur, le robot regardera dans la même direction, l'image en mémoire sera comparée à l'image vue pour déterminer s'il s'agit bien du même amer.
La tolérance sur cette comparaison est donné par une variable appelée vigilance, comprise entre 0 et 1, correspondant à la corrélation minimale requise pour dire que les deux images correspondent bien au même amer.
Pour notre tâche d'apprentissage, dans la mesure où le robot se contente de tourner sur place, il n'y a pas d'occlusions ni de déformations dans l'espacement des amers.
Pour un angle de vue donné, en supposant que l'environnement ne bouge pas trop pendant le temps d'apprentissage, les points de fort contraste restent les mêmes.
On n'a donc pas besoin d'une information visuelle aussi élaborée que cette imagette
.
La détermination de l'azimuth associé à un contraste ``fort'' est suffisante.
On a fixé  .
L'information qui sera prise en compte pour la suite du traitement est donc le vecteur qui donne l'estimation de l'azimuth des 5 amers sélectionnés.
Ce vecteur constitue l'information visuelle
.
L'information qui sera prise en compte pour la suite du traitement est donc le vecteur qui donne l'estimation de l'azimuth des 5 amers sélectionnés.
Ce vecteur constitue l'information visuelle
 , à valeurs sur
, à valeurs sur ![$ [0,1]$](img128.png) .
.
suivant: Ordres moteurs
monter: Application à la robotique
précédent: Application à la robotique
Table des matières
Index
Dauce Emmanuel
2003-05-07